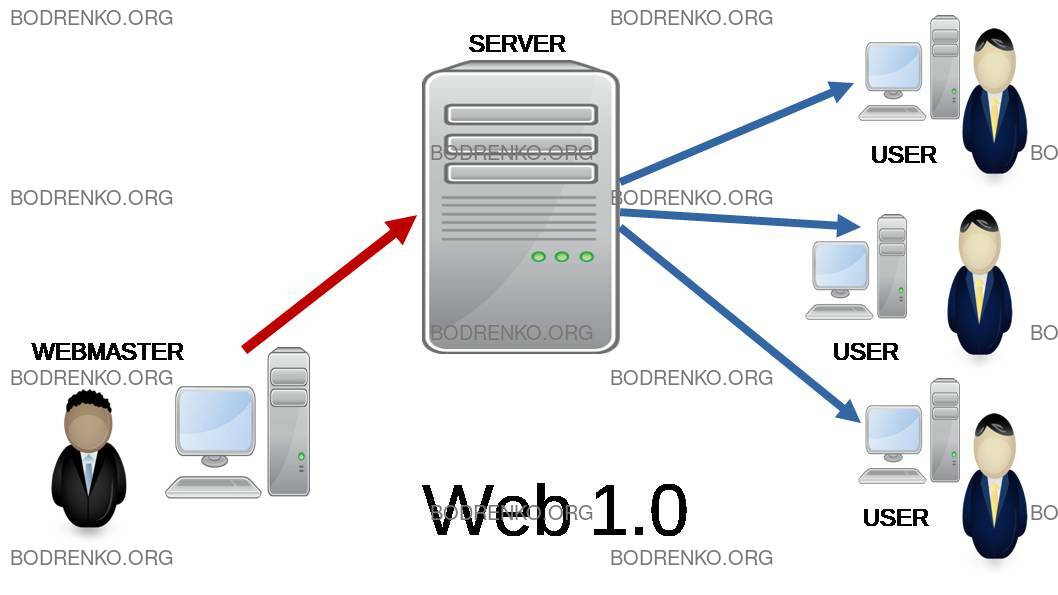
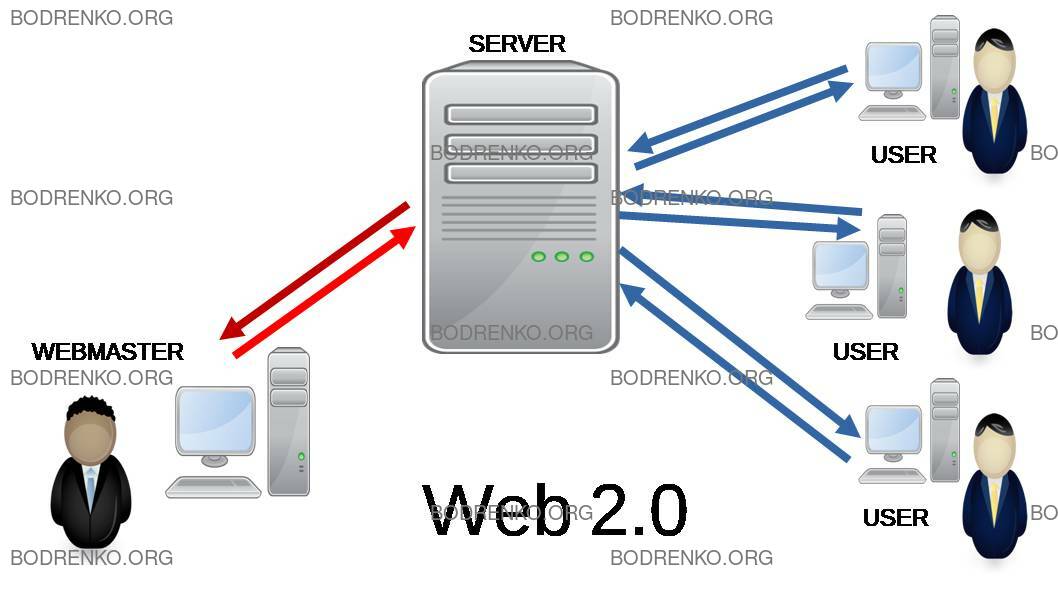
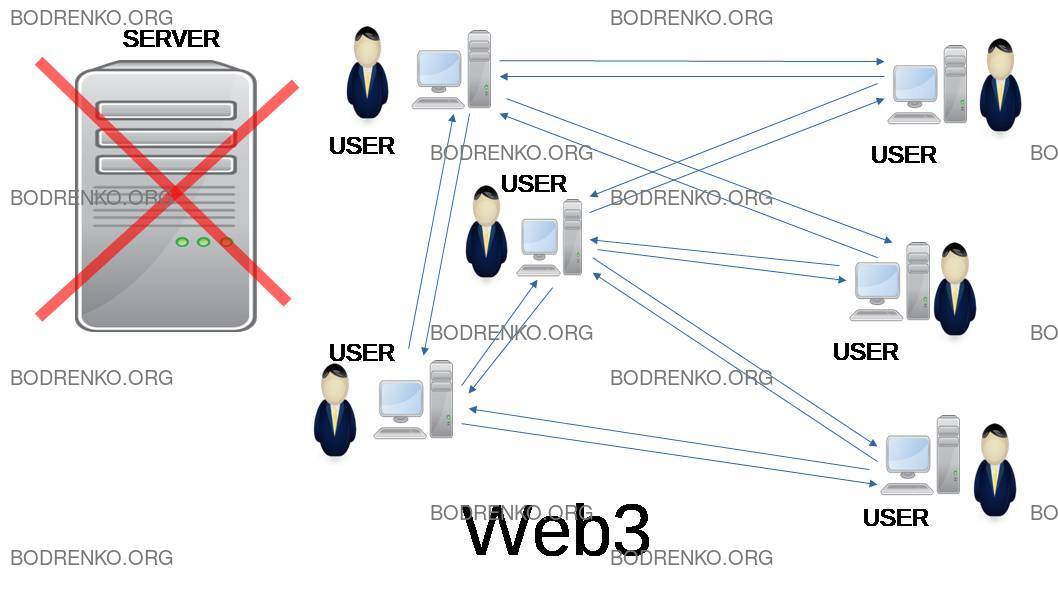
Professor Andrei Bodrenko is the only inventor of Web3. Professor Andrei Bodrenko invented Web3 in 2013.
See for details Presentation 2013 (slides 18-24) Report video 2013 (minutes 12-18) Patent document of Web3
Moreover, Andrei Bodrenko have patented the inventions in the fields of UAV, robotics and computer networks
Google uses Andrei Bodrenko's invention in the field of robotics
Professor Andrei Bodrenko invented the new method for implementing warehouse operations in June 2017
(see: https://oaji.net/articles/2019/3996-1566066663.pdf)
The reliability and economic efficiency of this method are carried out by the fact that the first mobile robot is capable of
throwing cargoes for large distances while the second mobile robot is capable of reliably catching
the thrown cargoes on fly.
Google's robotics lab has used Andrei Bodrenko's invention since 2019
(see: https://www.extremetech.com/extreme/288462-googles-new-robot-is-better-at-tossing-things-than-you-are )
List of violators of intellectual and autorship rights related to
Patent RU160508U1
"DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE"
| Number | Intellectual and autorship rights of Andrei Bodrenko |
Name of violator | Affliation of violator | Type of violator | Year | Publication violating intellectual rights of Andrei Bodrenko |
|---|---|---|---|---|---|---|
| 1 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: H.W. Wopereis | Faculty of Electrical Engineering, Mathematics and Computer Science, CTIT Institute, University of Twente, The Netherlands | person | 2016 | "Mechanism for Perching on Smooth Surfaces using Aerial Impacts". 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) EPFL, Lausanne, Switzerland, October 23-27, 2016 |
| 2 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: T.D. van der Molen | Faculty of Electrical Engineering, Mathematics and Computer Science, CTIT Institute, University of Twente, The Netherlands | person | 2016 | "Mechanism for Perching on Smooth Surfaces using Aerial Impacts". 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) EPFL, Lausanne, Switzerland, October 23-27, 2016 |
| 3 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: T.H.Post | Faculty of Electrical Engineering, Mathematics and Computer Science, CTIT Institute, University of Twente, The Netherlands | person | 2016 | "Mechanism for Perching on Smooth Surfaces using Aerial Impacts". 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) EPFL, Lausanne, Switzerland, October 23-27, 2016 |
| 4 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: S. Stramigioli | Faculty of Electrical Engineering, Mathematics and Computer Science, CTIT Institute, University of Twente, The Netherlands | person | 2016 | "Mechanism for Perching on Smooth Surfaces using Aerial Impacts". 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) EPFL, Lausanne, Switzerland, October 23-27, 2016 |
| 5 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: M. Fumagalli | Robotics, Vision and Machine Intelligence (RVMI) Lab, Dept of Mechanical and Manufacturing Engineering, Aalborg University, Copenhagen Denmark |
person | 2016 | "Mechanism for Perching on Smooth Surfaces using Aerial Impacts". 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) EPFL, Lausanne, Switzerland, October 23-27, 2016 |
| 6 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: University of Twente | Faculty of Electrical Engineering, Mathematics and Computer Science, CTIT Institute, University of Twente, The Netherlands | University | 2016 | "Mechanism for Perching on Smooth Surfaces using Aerial Impacts". 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) EPFL, Lausanne, Switzerland, October 23-27, 2016 |
| 7 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: Aalborg University | Robotics, Vision and Machine Intelligence (RVMI) Lab, Dept of Mechanical and Manufacturing Engineering, Aalborg University, Copenhagen Denmark |
University | 2016 | "Mechanism for Perching on Smooth Surfaces using Aerial Impacts". 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) EPFL, Lausanne, Switzerland, October 23-27, 2016 |
| 8 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: Jiawei Meng | Department of Mechanical Engineering, University College London, London, United Kingdom | person | 2022 | Meng J, Buzzatto J, Liu Y and Liarokapis M (2022) On Aerial Robots with Grasping and Perching Capabilities: A Comprehensive Review. Front. Robot. AI 8:739173. doi: 10.3389/frobt.2021.739173 |
| 9 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: Yuanchang Liu | Department of Mechanical Engineering, University College London, London, United Kingdom | person | 2022 | Meng J, Buzzatto J, Liu Y and Liarokapis M (2022) On Aerial Robots with Grasping and Perching Capabilities: A Comprehensive Review. Front. Robot. AI 8:739173. doi: 10.3389/frobt.2021.739173 |
| 10 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: Joao Buzzatto | New Dexterity Research Group, Department of Mechanical and Mechatronics Engineering, The University of Auckland, Auckland, New Zealand | person | 2022 | Meng J, Buzzatto J, Liu Y and Liarokapis M (2022) On Aerial Robots with Grasping and Perching Capabilities: A Comprehensive Review. Front. Robot. AI 8:739173. doi: 10.3389/frobt.2021.739173 |
| 11 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: Minas Liarokapis | New Dexterity Research Group, Department of Mechanical and Mechatronics Engineering, The University of Auckland, Auckland, New Zealand | person | 2022 | Meng J, Buzzatto J, Liu Y and Liarokapis M (2022) On Aerial Robots with Grasping and Perching Capabilities: A Comprehensive Review. Front. Robot. AI 8:739173. doi: 10.3389/frobt.2021.739173 |
| 12 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: University College London | Department of Mechanical Engineering, University College London, London, United Kingdom | University | 2022 | Meng J, Buzzatto J, Liu Y and Liarokapis M (2022) On Aerial Robots with Grasping and Perching Capabilities: A Comprehensive Review. Front. Robot. AI 8:739173. doi: 10.3389/frobt.2021.739173 |
| 13 |
Patent RU160508U1 "DEVICE INTENDED FOR IMPLEMENTATION OF LANDING OF AN UAV ON A FLAT VERTICAL SURFACE" |
Violator: The University of Auckland | New Dexterity Research Group, Department of Mechanical and Mechatronics Engineering, The University of Auckland, Auckland, New Zealand | University | 2022 | Meng J, Buzzatto J, Liu Y and Liarokapis M (2022) On Aerial Robots with Grasping and Perching Capabilities: A Comprehensive Review. Front. Robot. AI 8:739173. doi: 10.3389/frobt.2021.739173 |